Autel Evo 2 Dual 640T Thermal | Dron | 8K, thermovision
CÓDIGO: EVO 2 DUAL 640T / EAN: 6924991101482














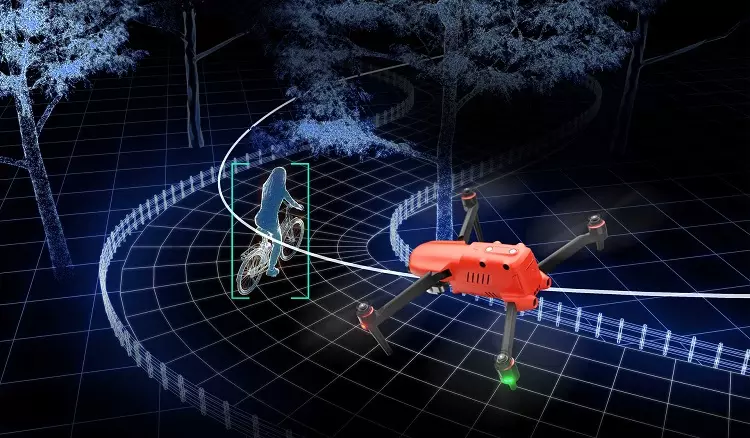
Equipado con 19 conjuntos de sensores, entre los que se encuentran 12 sensores visuales, una cámara principal, ultrasonidos, IMU y otros sensores, el AUTEL EVO 2 permite elaborar mapas en 3D y planificar trayectorias en tiempo real. Además, el Evo 2 Dual puede modelar simultáneamente la posición y la velocidad de los objetivos, predecir con precisión su trayectoria y seguirlos continuamente, identificando hasta 64 objetos simultáneamente.

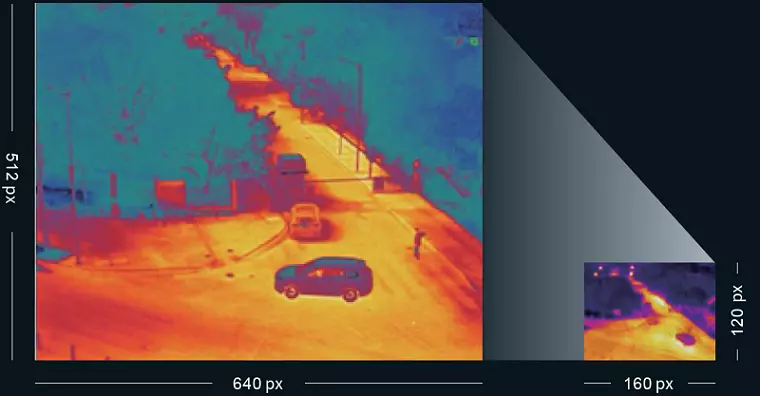
Equipado con el último sensor térmico FLIR® Boson 640×512, el Autel Evo II Dual soporta hasta 10 paletas térmicas para manejar una variedad de condiciones de disparo y escenarios de misión complejos. La resolución térmica de hasta 640×512 permite a los pilotos de la Autel Evo 2 Dual capturar objetos con gran detalle hasta 146 metros de distancia, 4 veces más lejos que cualquier modelo de su clase. Una frecuencia de imagen de 30 Hz garantiza un movimiento térmico suave y dinámico al adaptar las imágenes térmicas a la frecuencia de imagen del vídeo.
El Autel Evo 2 Dual puede modelar simultáneamente la posición y la velocidad de los objetivos, predecir con precisión su trayectoria y seguirlos continuamente, identificando hasta 64 objetivos simultáneamente.
La Autel Evo II Dual graba a resoluciones de hasta 7680×4320. Con un número de píxeles 4 veces mayor que el de 4k (y 16 veces mayor que el de HD), los vídeos 8k redefinen la claridad y la profundidad de la imagen.

El sensor de la cámara de 48 MP de la Evo II Dual capta todos los detalles relevantes para los forenses, ayudando a capturar las pruebas con precisión. Tanto las imágenes térmicas como las RGB se suministran con metadatos integrados, lo que convierte a la cámara EVO II Dual en la herramienta de seguridad pública definitiva.

El DRONE TÉRMICO AUTEL EVO 2 DUAL 640T tiene un rango muy amplio de aplicaciones debido a sus especificaciones. Podemos utilizar este modelo, entre otras cosas, para Lucha contra el fuego: localizar los puntos calientes, proporcionar vigilancia y reducir el tiempo de respuesta, Aplicación de la ley: observar, reconstruir la escena del accidente, seguir y vigilar a la multitud. Búsqueda y rescate: identificar a los actores, reducir el tiempo de respuesta y maximizar el área de búsqueda con la planificación automatizada de la misión.

| Especificaciones técnicas | |
| Sensor de la cámara de infrarrojos | Microbolómetro VOx no refrigerado |
| Resolución del sensor | EVO II Doble (640) 640*512 EVO II Doble (320) 320*256 |
| Paso de píxeles | 12 µm |
| Rango de longitudes de onda | 7,5-13,5 µm |
| FOV | EVO II Doble (640) 32° EVO II Doble (320) 34° |
| Sensibilidad térmica/NEdT | |
| Ampliación | 1 ~ 8x |
| Modos de fotografía | Toma única, serie y timelapse |
| Resolución de la fotografía fija | IR: 640 x 512 PIP: 1920 x 1080, 1280 x 720 |
| Formato de vídeo | MOV/MP4 (compatible con H.264/H.265) |
| Resolución de vídeo | 640x512 30Hz (USA) 640x512 9Hz (otras regiones) |
| Cámara | |
| Sensor de imagen | 1/2" CMOS |
| Píxeles | 48MP |
| Prospectiva | 79° |
| Lente | EFL: 25,6 mm |
| Apertura | f/2.8-f/11 |
| Distancia de enfoque | 0,5 m a cualquier distancia (en modo de enfoque automático) |
| Gama ISO: Vídeo | 100-6400 (automático) |
| Foto | 100-3200 (automático) |
| Ampliación | 1-8x (máx. 4x sin pérdidas) |
| Modos de fotografía | Serie de tomas únicas (3/5 imágenes) Ajuste automático de la exposición (AEB) Time-lapse (3/5 tomas) |
| Resolución de la fotografía fija | 8000x6000 (4:3) 7680x4320 (16:9) 4000x3000 (4:3) 3840x2160 (4:3) |
| Formato de vídeo | MP4 / MOV (MPEG-4 AVC/H.264, HEVC/H.265) |
| Resolución de vídeo | 8K 7680*4320 p25/p24 6K 5760*3240 p30/p25/p24 4K 3840*2160 p60/p50/p48/p30/p25/p24 2,7K 2720*1528 p120/p60/p50/p48/p30/p25/p24 1080P 1920*1080 p120/p60/p50/p48/p30/p25/p24 |
| Velocidad máxima de transmisión | 120Mbps |



